A key area of focus in the project is research on robot assignment and formation control algorithms. This is essentially a “teamwork” strategy for the mobile robots being developed
Tests in lab environments
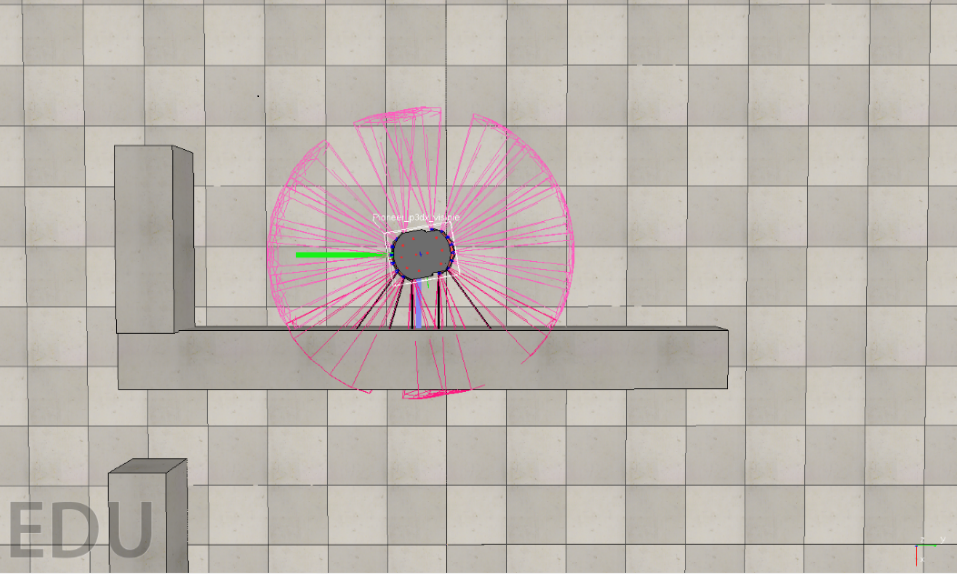
Making use of the developed facilities such as the vision tracking system “Mubassir”, a comprehensive environment has been developed where different real world scenarios can be emulated on a small scale.
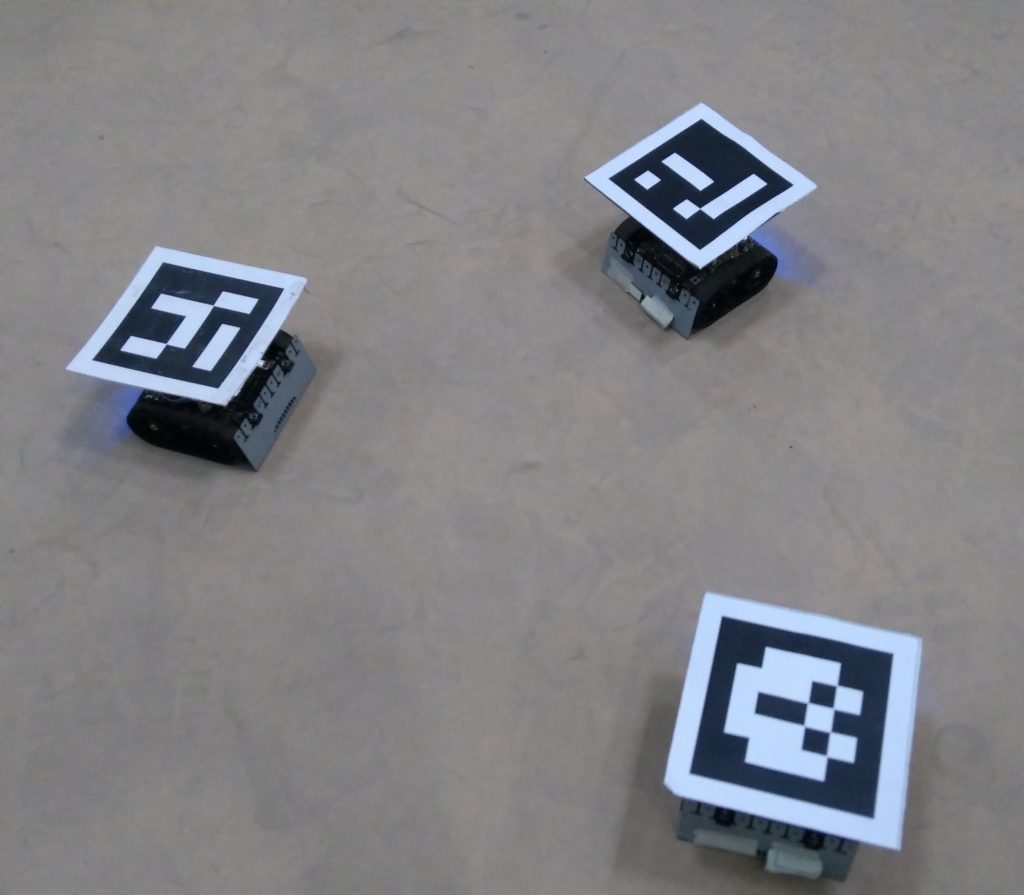
Lab environment tests for formation control were carried out by running the centralized algorithm in MATLAB on a PC. Zumo 32U4 robots are being used as the substitute of the full sized robot. The algorithm running on MATLAB gets feedback from the Mubassir vision system over LAN. However, movement commands to the robots are issued via a wireless serial link using the Zigbee protocol.
Methodologies investigated
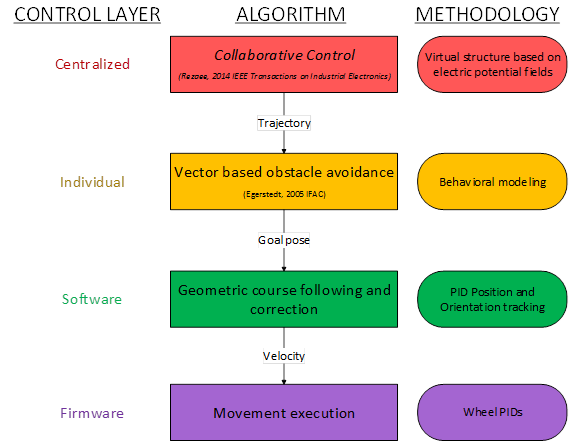
The layered structure of control scheme for the overall movement can be explored to test different approaches at various levels.
Cooperative movement
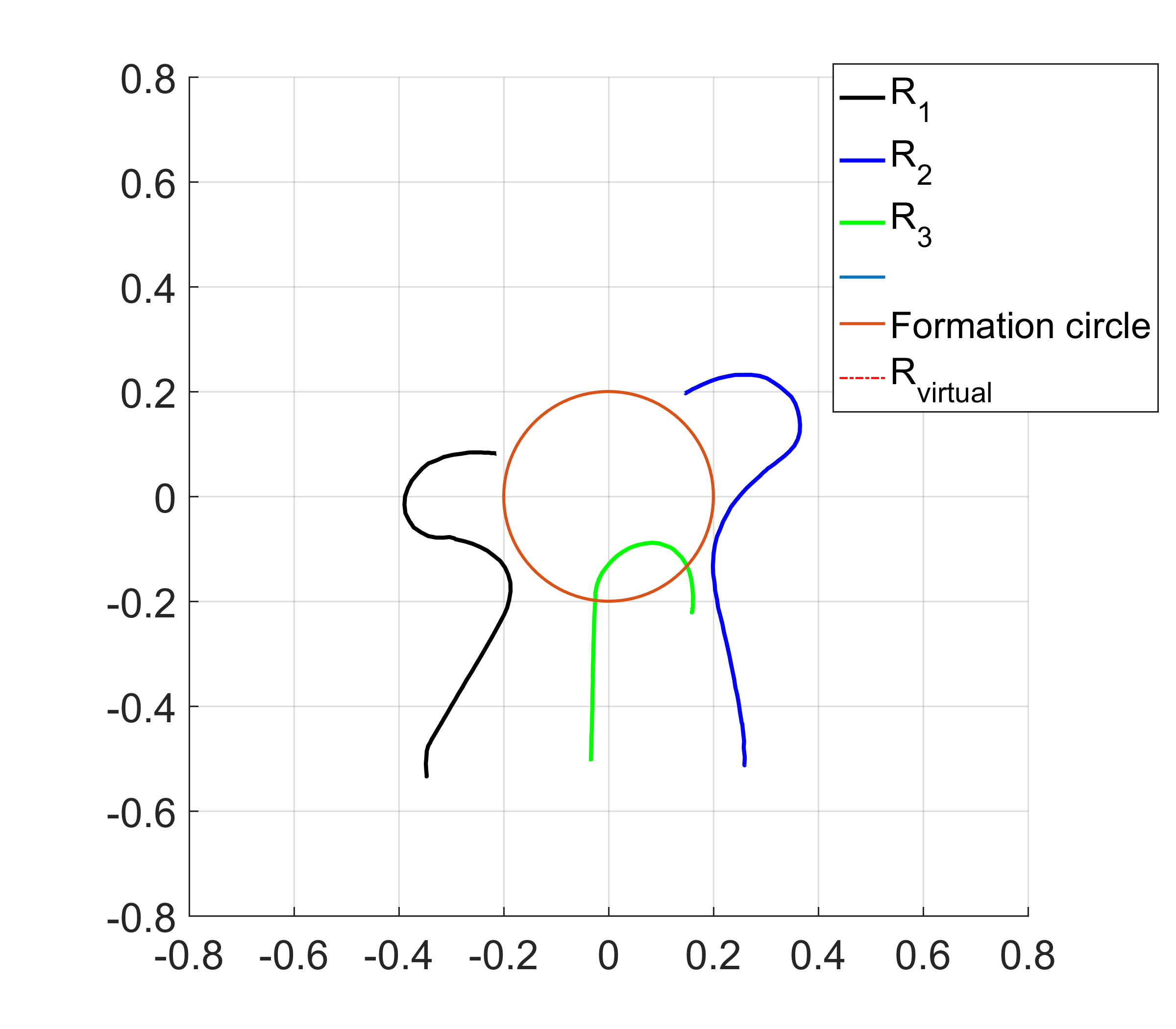
The method proposed by “A Decentralized Cooperative Control Scheme With Obstacle Avoidance for a Team of Mobile Robots” by Hamed Rezaee & Farzaneh Abdollahi was taken up as the first algorithm in the test environment. The original scheme contains point robots that can move in any direction in the X-Y plane i.e. they are holonomic. The scheme was first tailored to work with differential drive robots and the experiments showed promising results.
Obstacle Avoidance
This approach given by Magnus Egerstedt forms a resulting target direction vector for the robot based on the detection of obstacles from its sensors. The location and direction of sensors is used to complete the coordinate transformation to identify the exact direction of the obstacle. From this direction, an obstacle avoidance normal vector is formed. It is checked whether the obstacle avoidance goal and global goal direction are coinciding. In case the obstacle is in sight, the local direction is modified to go towards the global goal as well as turn away from the obstacle. When the robot is alarmingly close to an obstacle, the obstacle avoidance vector overrides the goal vector until such time the obstacle moves out of view.