The IMR firefighting robots are not a one step process but that these have evolved from simple lab robots named MUSAFIR bots to a bigger and more robust sensor platform containing robot called MUSAFIR v2. The Musafir V2 provides an all in one entity to calibrate sensors, verify compatibility and test control algorithms.
Finally, the results can be directly ported to the IMR firefighting robots which are full sized and use multiple heavy duty motors and sturdy structure
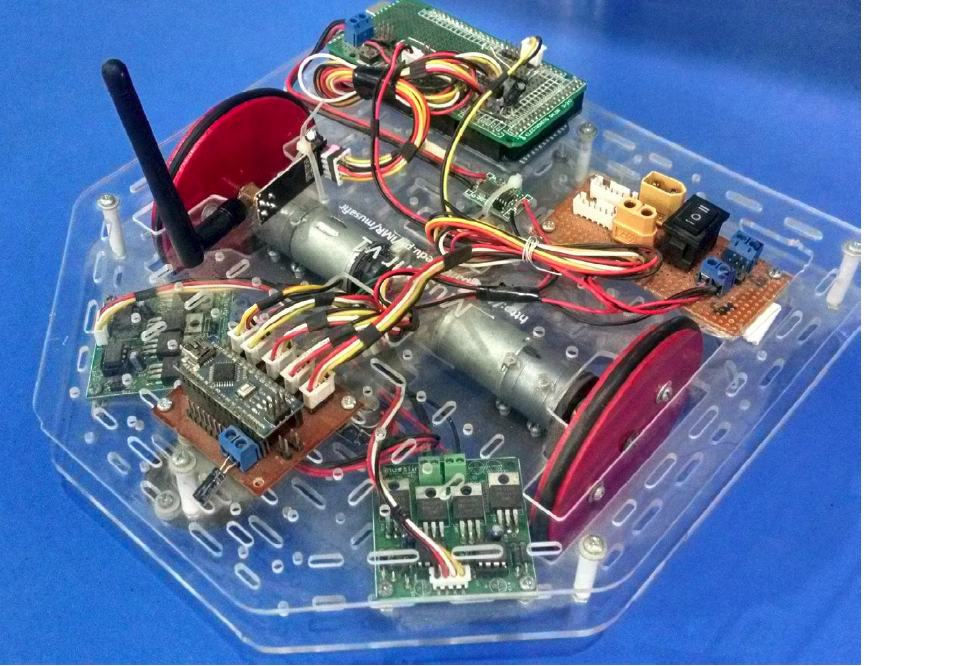
MUSAFIR v1
MUSAFIR v1 was built with plastic acrylic sheets, LASER cut to our required size and shape. The motors used had built-in encoders which allowed us to do odometery whereas onboard IMU provided acceleration and velocity readings. MUSAFIR v1 had distributed control, with two micro-controller boards on the robot, one for odometery and velocity control which implemented low level PID control for both motors and the other controller which communicates with the main computer using a 2.4GHz transceiver and also uses an SD Card for data logging.
The Electronics onboard MUSAFIR v1 is listed below:
- Lipo Battery, 4S, 5200mAh
- Buck Converters – 5V for Controllers and 12V for Motor Drivers
- Motor H-Bridge v1
- 12V DC Geared Motor with Encoder (1500CPR)
- Motor Controller v1 – Arduino Nano interface board
- Arduino Mega – for communication
- MPU-9150 – 9-Axis IMU32
- nRF24L01+ 2.4GHz Transceiver
- SD Card Module
MUSAFIR v1 was our first implementation and we managed to create 2 identical MUSAFIR v1 robots which were controlled by a computer using a USB to Serial 2.4GHz Transceiver Bridge that we had made, using Arduino and nRF module.
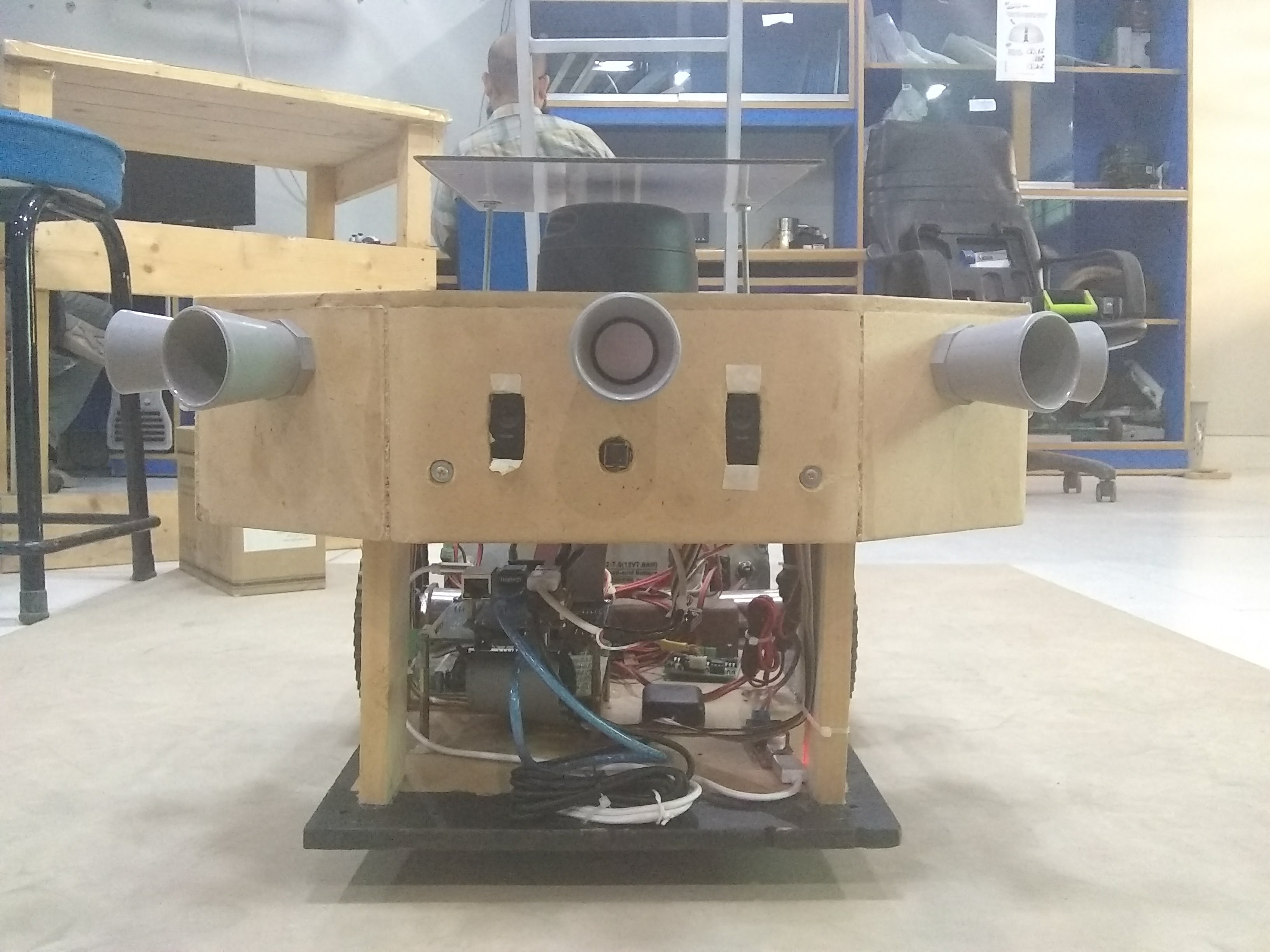
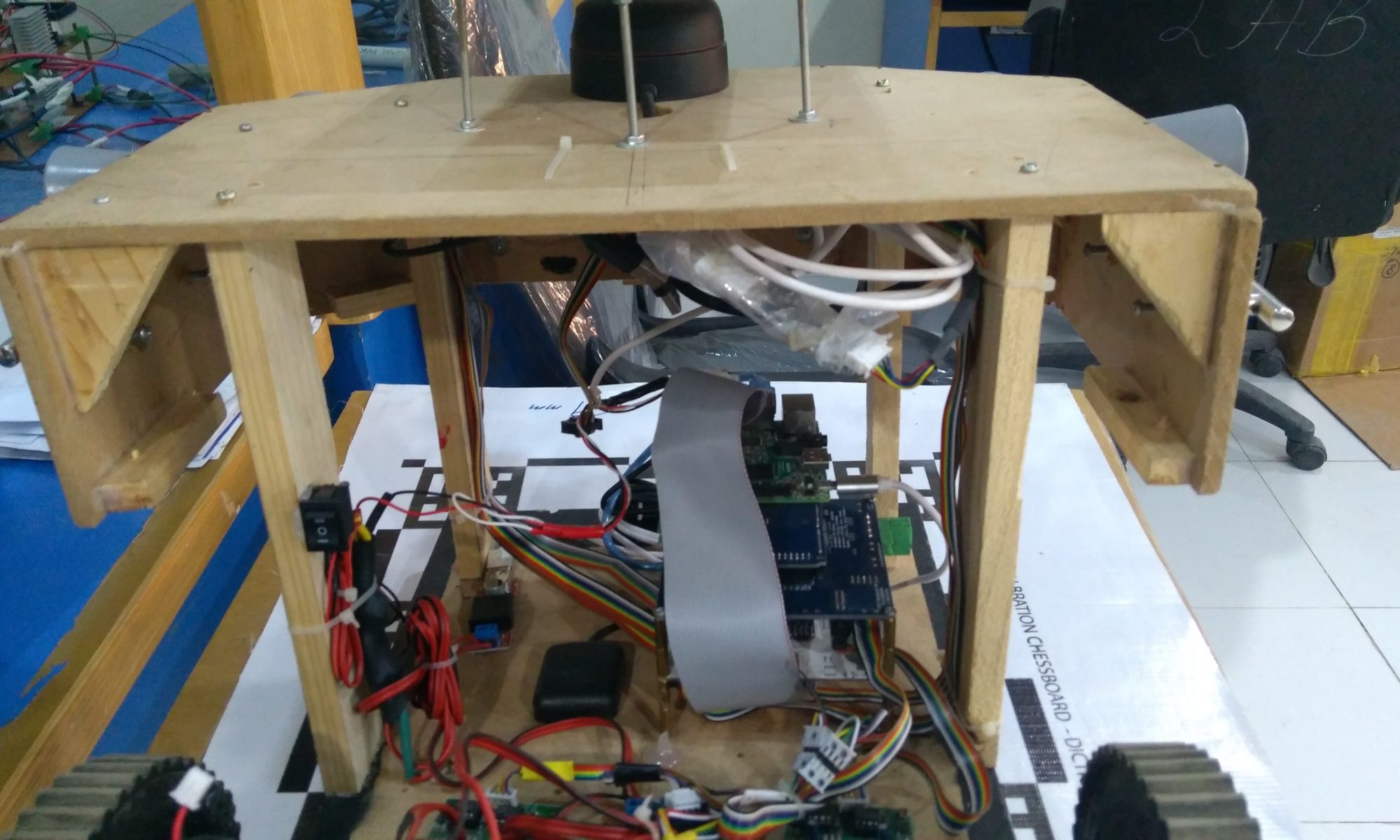
MUSAFIR v2
MUSAFIR v2 as seen in the pictures before, was a complete remake of the robot with better
tyres for gripping on rough surfaces and a bigger body accommodate all the new sensor modules
and the circuitry. The electronics on MUSAFIR v2 is mostly same as MUSAFIR v1.5, with
addition of 2 VGA Cameras at the front and also space for some Ultra Sonic Sensors to be added
later to the front of the Robot and a LIDAR on top.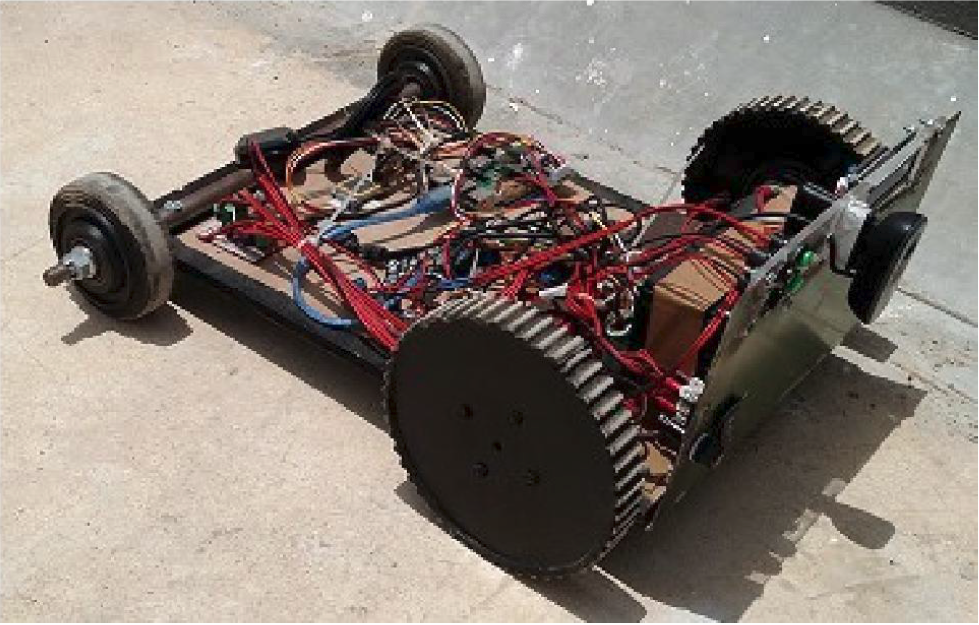
The Electronics onboard MUSAFIR v2 is listed below:
- Sealed Lead Acid Battery, 12V, 7Ah
- Buck Converters – 5V for Raspberry Pi and LIDAR
- Motor H-Bridge v2
- 12V DC Geared Motor with Encoder (1500CPR)
- Motor Controller v2 – Arduino Nano interface board
- MPU-9150 – 9-Axis IMU
- RP LIDAR A2
- 2x LogiTech USB Cameras
- TPLINK WiFi Module
- uBlox Neo 6m GPS Module
- I2C 16×2 Text LCD Module
- Analog Battery Voltage Monitoring Circuit
- Power/Switch/Charger Circuitry
The MUSAFIR v2 body was made of sheet metal, while the base was made of wood, wheels being made out of Teflon. The motors used for MUSAFIR v2 had a very high gear ratio along with encoders, resulting in slow but precise movement of the robot.